







 홈
지역
홈
지역
[뉴스프리존,대전=이기종 기자] 한국연구재단(NRF)은 한국과학기술원(KAIST) 기계공학과 박형순 교수팀이 사람 손바닥 피부의 기계적 특성을 모사, 로봇 손의 조작 성능을 높여줄 인공피부를 개발했다고 1일 밝혔다.
손바닥 피부는 손이 외부자극을 수용할 수 있는 감각기능을 수행하거나 물체를 안정적으로 고정, 조작할 수 있는 작업기능을 원활히 수행하는 데 중요한 역할을 한다.
하지만 기존 로봇 손의 피부는 주로 미용상의 기능을 수행하는 데 초점을 두고 있어 작업능력에는 기여 못했다.
최근 피부구조가 손의 작업기능에 미칠 수 있는 영향에 대해 관심이 늘면서 실제 사람 손 피부처럼 촉감이나 온도 등을 감각을 측정할 수 있는 다양한 센서를 포함한 기능성 피부들이 개발되고 있다.
하지만 대부분 피부 감각기능 구현에 초점이 맞춰져 있어 사람 피부 구조의 물리적 특성 자체가 작업 기능에 기여하는 점은 고려되지 않고 있다.
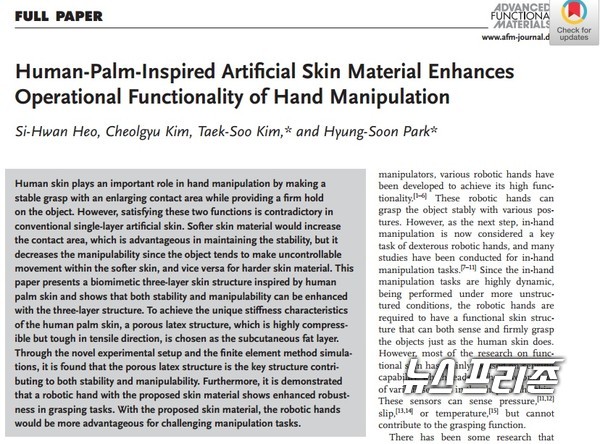
이번 연구진은 이러한 제한점을 해결하기 위해 피부의 감각기능뿐만 아니라 사람 손바닥 피부의 물리적 특성을 구현함으로써 피부구조 그 자체로 기존 로봇 손의 작업 기능성을 향상시킬 수 있는 기술을 개발했다.
연구과정을 보면 손바닥 피부를 물리적 장벽이자 다양한 감각을 수용하는 기관으로만 보지 않고, 임의의 모양의 물체에 밀착되도록 변형되면서 물체를 안정적으로 고정한다는 점에서 손의 조작기능에 영향을 미치는 중요한 변수로 주목했다.
이어 손바닥 피부를 겉 피부층, 피하지방층, 근육층으로 구조화하여 각 특성을 분석, 피하 지방층의 비대칭적인 물리적 특성이 기능적 장점을 만들어 내는 핵심요소임을 알아냈다.
이로 인해 부드러운 지방조직과 질긴 섬유질 조직이 복합되어 누름에 유연하면서도 비틀림이나 당김에 의한 변형에 대해서는 강인하게 버틸 수 있다는 것이다.
또 이를 토대로 손바닥처럼 말랑한 다공성 라텍스 및 실리콘을 이용해 손바닥 피부와 동일한 비선형적·비대칭적 물리적 특성을 지니는 3중층 인공피부를 제작했다.
이 과정에서 기공들이 누름에 대해서는 쉽게 압축되어 물체의 형상에 맞게 쉽게 변형되도록 하는 한편 기공 사이에 질긴 라텍스 격벽이 비틀림이나 당김에 강하게 저항함으로써 대상 물체를 견고하게 잡을 수 있도록 한 것이다.
이 연구결과에 따르면 실제 이렇게 만들어진 3중층 인공피부를 부착한 로봇 손은 기존 실리콘 소재의 단일층 인공피부를 부착한 로봇 손 대비 물체를 고정할 수 있는 작업 안정성과 물체를 움직일 수 있는 조작성이 30% 향상됐다.
이 연구는 과학기술정보통신부와 한국연구재단이 추진하는 바이오닉암메카트로 닉스융합연구사업 및 선도연구센터사업의 지원으로 수행됐고 신소재 분야 국제학술지 ‘어드밴스드 펑셔널 머티리얼즈 (Advanced Functional Materials)’에 5월 8일 게재됐다.
