







 홈
지역
홈
지역
[뉴스프리존,대전=이기종 기자] 한국과학기술원(KAIST)은 전기및전자공학부 명현 교수팀이 일명 두더지 로봇인 ‘몰봇(Mole-bot)’을 개발했다고 5일 밝혔다.
석유, 석탄 등 기존 에너지원으로 이용되는 자원의 고갈이 가까워진 시점에서 새로운 에너지원으로 이용될 수 있는 자원의 탐사를 위한 연구 및 기술 개발이 필요하다.
이러한 자원 탐사는 산업 및 기술의 발전에 기여할 뿐만 아니라 새로운 드릴링 시스템의 개발을 요구하고 있다.
현재 여러 정교한 회전식 드릴 비트와 안정적인 방향성 드릴링 메커니즘이 제안됐다.
그러나 이러한 목표를 달성하기 위해 시스템의 크기 및 중량이 증가하고 있으며 복잡한 환경 및 극한지역에서는 사용이 제한된다.
또 굴착된 토양의 처리는 각종 화합물이 섞인 이수 사용으로 환경 오염 유발, 추가 시스템을 필요로 하는 등 여러 가지 제한점을 가지고 있다.
이번 연구팀은 이러한 제한점을 해결하기 위해 자연에서 굴착 습성을 가지는 동물을 모사한 새로운 지하 공간 탐사 로봇 시스템을 개발했다.
연구과정을 보면 효율적인 시추 및 탐사를 위해 생물체의 굴착 습성과 생물학적 구조를 모사한 두더지 로봇(mole-bot, 몰봇)을 개발했다.
몰봇은 크게 드릴링부, 잔해 제거부, 방향전환을 위한 허리부, 그리고 이동 및 고정부로 구성되고 크기는 지름 25cm, 길이 84cm이며, 무게는 26kg이다.
우선 드릴링 메커니즘은 이빨로 토양을 긁어내는 두더지 종 중의 하나인 ‘치젤 투스(Chisel tooth mole)’를 생체모방해 새로운 확장형 메커니즘을 개발했는데 기존 기술 대비 높은 확장성을 가지며 안정적인 드릴링이 가능하다.
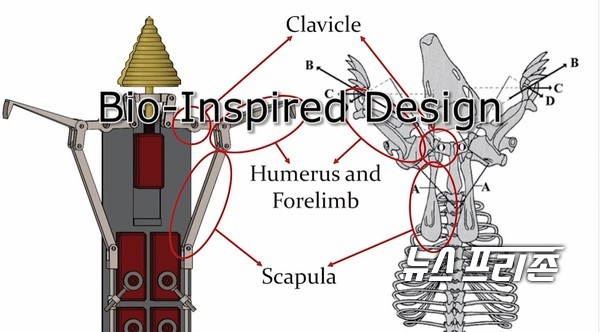
또 잔해 제거 메커니즘은 크고 강력한 앞발을 이용해 굴착 및 잔해를 제거하는 또 다른 두더지 종인 ‘휴머럴 로테이션(Humeral rotation mole)’의 특별한 어깨구조를 모사해 설계했다.
이 휴머럴 로테이션은 길쭉한 형태의 견갑골을 가져 견갑골의 직선운동을 상완골에서 강력한 회전력으로 변환할 수 있다.
이러한 생물학적 구조를 모방해 효율적인 잔해 제거가 가능하도록 앞발 메커니즘을 새로 개발했다.
각 부분에서 허리부는 두더지의 허리를 모사한 메커니즘을 통해 지하 내에서 360도 자유롭게 방향 전환이 가능하다.
또 착 메커니즘을 가지는 앞몸체와 이동 및 고정 역할을 하는 뒷몸체로 각각 구성돼 있으며, 두 몸체 사이를 선형 구동기로 연결하고 스트로크 조절을 통해 자유롭게 좌우회전을 할 수 있다.
이어 이동부는 동일한 3개의 유닛을 삼각형 형태(120도 간격)로 균등 배치해 지하 내에서 안정적인 지지 및 이동을 할 수 있도록 설계됐다.
이는 불규칙한 토양 환경, 암석 등 예측 불가능한 지하 내에서 안정적인 이동을 위해 무한궤도를 이용한 이동 방식을 적용한 것이다.
이 밖에 개발된 로봇에 지하에서 로봇의 위치를 측정할 수 있는 센서 시스템과 알고리즘을 탑재했다.
지하 환경은 주변이 암석과 흙으로 이뤄져 있어 무선통신 신호를 활용하기 어렵고 또 내부가 협소하고 어두워 비전 및 레이저 센서를 사용하기 어렵다.
이를 해결하기 위해 몰봇에 자기장 센서가 포함된 관성항법 센서를 탑재했고 지구 자기장 데이터의 변화를 측정해 로봇 위치를 인식할 수 있다.
개발된 몰봇은 한국산업기술시험원(KTL)의 공인인증 평가를 통해 성능을 검증했으며 총 4개의 항목에서 평가를 받았다.
이 평가에서 최대 굴진각은 100피트당 38도, 위치 인식 평균 제곱근 오차는 6.03cm, 굴진 속도는 시속 1.46m, 방향각 추정 오차는 0.4도 등으로 기존 세계 최고 방식과 비교할 때 굴진 속도는 3배 이상, 방향각 추정성능은 6배 이상 향상된 성능을 보였다.
이 연구는 산업통상자원부 산업기술혁신사업의 지원을 받아 수행됐고 로봇 구조 해석 및 지반 실험은 홍정욱 교수, 권태혁 교수 연구팀과 협업했다.
